內(nèi)容目錄:
1 智能車隊編組行駛
1.1 智能網(wǎng)聯(lián)自動駕駛
1.2 車輛編隊控制模型
1.3 PC5 接口
2 PC5 接口安全威脅
2.1 通信可靠性風險
2.2 信息泄露風險
2.3 數(shù)據(jù)篡改風險
2.4 身份仿冒風險
3 防御建議
4 結(jié) 語
車輛是人類社會生產(chǎn)�����、生活的重要工具��,在給人們生活帶來巨大便利的同時也引發(fā)了交通安全����、路怒癥等問題。世界衛(wèi)生組織發(fā)布的《2018 年全球道路安全現(xiàn)狀報告》顯示�,全世界每年大約有 135 萬人會在交通事故中失去生命,而 94% 的交通事故是人為原因造成的 ���。自動駕駛技術通過車輛間通信技術��、協(xié)商通行權限等方式���,減少甚至解放司機的工作���,有效降低了人為因素導致的交通事故,大幅提高了交通安全性�����,同時也提高了道路的通行效率��。隨著通信技術����、人工智能技術、車載傳感器技術的進步�����,車輛自動駕駛的實現(xiàn)已經(jīng)具備技術基礎���,逐步成為學術界、工業(yè)界研究的熱點����,日漸成熟。2021 年����,美國交通部研究表明����,現(xiàn)在已大規(guī)模商用的����、采用低等級(L2)輔助駕駛技術的車輛,可將事故發(fā)生率降低 60% 左右 ��,而采用更高等級自動駕駛技術將有望進一步大幅提高交通安全性�。此外,在運輸領域�,自動駕駛可以提高交通效率,降低社會整體的物流成本��,還可以替代人工駕駛員���,降低運輸成本���,提高生產(chǎn)效率。
對運輸企業(yè)而言��,自動駕駛最大的好處就是減少車輛行駛中的燃油消耗及降低人工成本。
隨著技術的發(fā)展���,蜂窩車聯(lián)網(wǎng)(Cellular Vehicle to Everything����,C-V2X)已經(jīng)成為自動駕駛的核心技術����,旨在車、網(wǎng)互聯(lián)����,以及把車與車、車與人���、車與道路等基礎設施連成網(wǎng)��,以實現(xiàn)車與外界信息的交換�。C-V2X 主要包括車與行人(Vehicle to Pedestrian�,V2P)����、車與車(Vehicle to Vehicle,V2V)、車與路(Vehicle to Infrastructure��,V2I)�����、車與網(wǎng)絡(Vehicle to Network�,V2N)的全方位網(wǎng)絡連接。
C-V2X 消 息 可 以 通 過 通 用 用 戶 網(wǎng) 絡 接 口(Universal User to Network interface����,Uu) 在 基站和用戶設備(User Equipment,UE)之間傳輸����,也可通過直連通信(Proximity Communication,PC5)接口在 UE 之間直接傳輸�����,即設備與設備之間直接通信��。
第三代合作伙伴計劃(3rd Generation Partnership Project�����,3GPP)發(fā)布的移動通信標準 R16 版本中,對基于 5G 新空口(New Radio�,NR)的車聯(lián)網(wǎng)車用無線通信技術(Vehicle to Everything,V2X)進行規(guī)范�,以通過 5G NR 更低的時延、更高的可靠性�、更高的容量來提供更高級的 V2X 服務。
1. 智能車隊編組行駛
1.1 智能網(wǎng)聯(lián)自動駕駛
現(xiàn)有的自動駕駛解決方案大部分聚焦在基于單車智能的感知和決策上���,其主要限制因素包括感知能力的局限�����、攝像頭視頻和圖像認知能力的局限�,以及單車處理非結(jié)構化數(shù)據(jù)(原始多源異構感知數(shù)據(jù))時計算和通信能力受限等���。而 C-V2X 技術可以實現(xiàn)智能網(wǎng)聯(lián)輔助的自動駕駛���,通過在車與車、車與路間快速建立可靠的通信連接��,使得車輛有關的結(jié)構化數(shù)據(jù)在車輛之間進行有效交互�����,從而降低了車輛自身的環(huán)境感知和數(shù)據(jù)處理的要求��,同時通過全局決策可以有效地提高交通效率��、降低事故發(fā)生率��。公路的車輛編隊場景�,尤其是公路貨運車隊。
車輛編隊��,即多輛車以一定的車間間距形成穩(wěn)定的隊列�。通過減小車輛間距,車輛編隊技術可以提高道路容量��,同時使每輛車受益于其前車行駛而減少空氣阻力����,進而降低燃油消耗。付思雨等人指出��,當兩輛相同標準的載貨 車 以 80 km/h 的 速 度 和 25 m 的 間 距 在 高 速公路上行駛時���,后方跟隨車輛所受空氣阻力將下降 30%����,整體的燃油經(jīng)濟性將提升 7%。而3GPP 的研究指出�����,車輛編隊行駛時����,若隊列內(nèi)車輛在 100 km/h 的速度下維持 8~25 m 的間距,可以節(jié)省 7%~15% 的燃油消耗�����。但是����,更高的速度和更小的間距意味著更大的碰撞風險,因此迅速����、有效地調(diào)整車隊內(nèi)每一輛車的行駛狀態(tài)顯得尤為重要。在車輛編隊中��,行駛方向上的第一輛車稱為領航車����,后續(xù)車輛稱為跟隨車��,一般領航車負責控制車隊的行駛速度���、方向等��,并且采用有人駕駛或有人監(jiān)控的無人駕駛��;跟隨車為無人駕駛�,其可以接收領航車的指令修正自身行駛速度、方向等��。
車輛編隊在公路貨運過程中���,尤其是高速公路貨運場景下�����,由于道路環(huán)境相對簡單��,車輛的型號�、行駛特征等較為一致�����,因此實現(xiàn)智能車隊編組行駛比較容易。雖然車輛編隊現(xiàn)在還無法實現(xiàn)完全的無人駕駛���,但是采用領航車有人駕駛�����,跟隨車無人駕駛���,遠程監(jiān)視 / 操控輔助的方式已經(jīng)在實際道路貨物運輸中得到應用。例如��,滴滴貨運等已經(jīng)在實際道路運輸中進行了小規(guī)模實踐���,效果良好�����,能夠顯著降低公路貨運的人工成本和燃油消耗��。
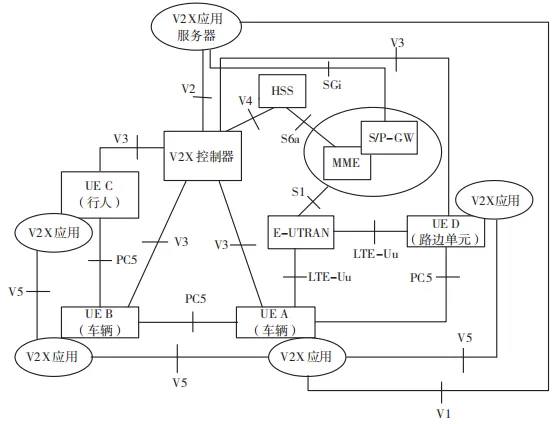
3GPP R16 相關標準中規(guī)定的車聯(lián)網(wǎng)架構如圖 1 所示 ��。
圖 1 3GPP V2X 系統(tǒng)架構
圖 1 中 UE A 和 UE B 是車輛間通信����;UE A和 UE D 是通過車載單元(On Board Unit,OBU)和路側(cè)單元(Road Side Unit��,RSU)間 PC5 接口直連通信���。采用直連通信能夠降低通信時延���,實現(xiàn)快速調(diào)整交通參與者的行駛狀態(tài)的目的���。以車輛間通信過程為例��,V2V 通信過程如圖 2 所示�。
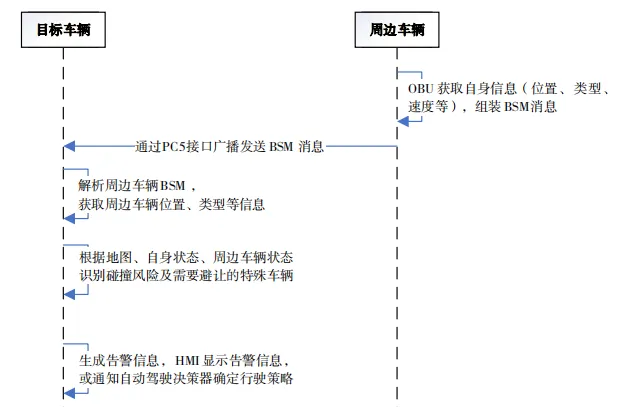
圖 2 V2V 通信過程
(1)RSU 廣播消息���。RSU 作為通信基礎設施的一部分�����,會周期性地廣播一些基本的系統(tǒng)信息和服務通告��,比如路況��、交通信號燈狀態(tài)等�。這些信息通過無線信道發(fā)送給附近的車輛。OBU接收 RSU 信息�����,對這些信息進行解析和處理�,識別出與車輛當前位置相關的消息,并結(jié)合車載傳感器的數(shù)據(jù)�����,獲取自身行駛狀態(tài)及路況�。
(2)OBU 廣播基本安全消息(Basic Safety Message,BSM)�。OBU 根據(jù)自身行駛狀態(tài)及行駛意圖,組裝 BSM 并通過 PC5 廣播���。
(3)解析其他車輛信息����。從 PC5 接口接收其他 OBU 發(fā)送的 BSM�����,獲取其他車輛的位置、狀態(tài)�����、類型�����、尺寸等信息��。
(4)風險識別����。OBU 根據(jù)地圖�、自身狀態(tài)和其他車輛信息,篩選有碰撞風險的車輛或者需要避讓的特殊車輛�。
(5)生成告警消息。OBU 根據(jù)識別出的風 險 生 成 告 警 消 息����, 通 知 人 機 界 面(Human Machine Interface,HMI)或自動駕駛決策器�����。
(6)決策駕駛策略。HMI 顯示告警信息或自動駕駛決策器根據(jù)告警消息生成行駛策略�,并通過控制相關部件等操作改變行駛方向、速度等����,同時將行駛意圖封裝到 BSM 中并發(fā)送。
總的來說�,OBU 通過 PC5 接口接收廣播消息、發(fā)送請求��,以及與 RSU 直接通信來獲取所需的信息����,實現(xiàn)車輛的協(xié)同與輔助。這種通信過程可以提供更安全����、高效的道路交通管理和交互。
1.2 車輛編隊控制模型
領航車需要控制車隊的整體行駛狀態(tài)���,動態(tài)調(diào)整跟隨車的速度����、方向等�����,保持車隊的串穩(wěn)定性。所謂串穩(wěn)定性����,即隊列內(nèi)車輛之間的距離誤差不會沿著隊列傳播而放大,并且所有的誤差保持相同的精度以避免碰撞 �����。確保串穩(wěn)定性的方法有恒定車頭時距法和恒定間距法兩種���。在恒定車頭時距法中�����,距離誤差被定義為車輛與前車的實際車頭時距和目標時距的差值�����,為使其逐漸收斂為零且不沿隊列傳播,車輛需要實時探測與前車的間距����,這種方法通常不需要來自其他車輛的大量數(shù)據(jù)����,但車間距會隨速度變化而變化���,可能會達到一個非常大的值�,因此只能實現(xiàn)較低的道路容量���。為了實現(xiàn)更高的道路容量和更低的燃油消耗�����,通常選擇恒定間距法����,即以頻繁進行車間通信為代價使車輛之間的距離保持恒定����。
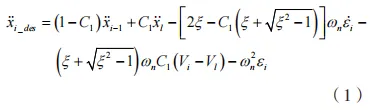
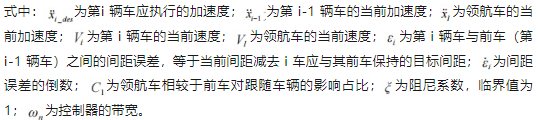
在恒定間距法中,車輛的速度可以用式(1)計算 [2]:
領航車通過式(1)可計算出每輛跟隨車應執(zhí)行的加速度����。
該方法的核心思想是通過讓隊列中的車輛執(zhí)行式(1)計算的理想加速度,使間距誤差逐漸收斂為 0��,最終確保串穩(wěn)定性。車輛的理想加速度取決于領航車和前車的加速度和速度�,這些信息不能直接通過傳感器測量,而需要車輛之間頻繁的信息交互����,要求大容量、低時延的通信技術�����,PC5 接口直接通信能夠滿足該需求����。
1.3 PC5 接口
PC5 是 3GPP 提出的終端間的通信接口,由LTE-D2D 發(fā)展而來�����,能夠?qū)崿F(xiàn)車�、人、RSU 之間的短距離直連通信�,具備低時延���、高容量����、高可靠的特性。在 3GPP R16 版本標準中���,PC5 接口在原有的廣播模式的基礎上�����,增加了單播和組播通信模式����,但主要還是使用廣播發(fā)送消息�。
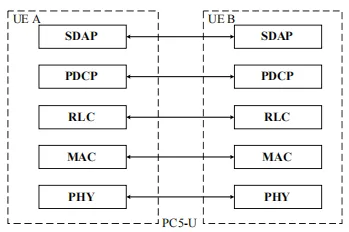
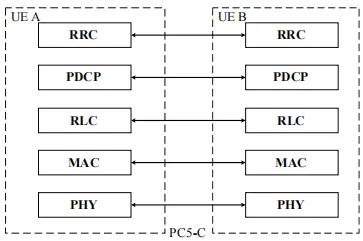
如圖 3、圖 4 所示����,PC5 接口和 Uu 接口復用相同的協(xié)議棧,主要包括如下協(xié)議:服務數(shù)據(jù) 適 配 協(xié) 議(Service Data Adaptation Protocol���,SDAP)�、無線資源控制(Radio Resource Control�����,RRC)、分組數(shù)據(jù)匯聚協(xié)議(Packet Data Convergence Protocol�����,PDCP)��、無線鏈路控制層(Radio LinkControl�,RLC)、媒體訪問控制層(Medium AccessControl�,MAC)、物理層(Physical Layer���,PHY)��。在 MAC 及以上協(xié)議中增加支持 C-V2X 的參數(shù)����。因此����,在手機基帶芯片的基礎上研發(fā)了 OBU 和RSU 中的基帶芯片,以降低開發(fā)成本�。這也是C-V2X 相比其他智能駕駛標準的優(yōu)勢。
圖 3 PC5 接口用戶面協(xié)議棧
圖 4 PC5 接口控制面協(xié)議棧
1.3.1 V2X 消息
在 YD/T 3709—2020《基于 LTE 的車聯(lián)網(wǎng)無線通信技術 消息層技術要求》中規(guī)定了 PC5 接口上傳輸?shù)?5 種 V2X 消息。
(1)BSM��,包括速度��、轉(zhuǎn)向���、剎車、雙閃�、位置等,多用于 V2V 場景���。例如變道預警�����、盲區(qū)預警�、交叉路口碰撞預警等����。
(2)路側(cè)交通信息(Road Side Information,RSI)��,RSU 下發(fā)道路事件�����,多用于 V2I 場景。例如道路施工���、限速標志����、超速預警��、公交車道預警等��。
(3)路側(cè)安全消息(Road Side Message�����,RSM)�����,多用于 V2I 場景��。路側(cè)單元獲取其周邊交通參與者的實時狀態(tài)信息(包括路側(cè)單元本身�����、周圍車輛、非機動車�����、行人等)����,將這些信息整合后作為交通參與者的基本狀態(tài)信息廣播給周邊車輛���。例如車輛發(fā)生事故�、車輛異常��、異物闖入等��。
(4)信號燈相位與配時消息(Signal Phase Timing Message��,SPAT)�,RSU 集成信號燈或者信號燈上報 SPAT 消息到 V2X 應用服務器,V2X應用服務器根據(jù)信號燈空間關系����,將一個或多個信號燈信息通過 RSU 推送給車輛,與地圖(MAP)消息結(jié)合可以用于車速引導��、綠波推送場景等。
(5)MAP 消息���,由路側(cè)單元廣播�,向車輛傳遞局部區(qū)域的地圖信息����。包括局部區(qū)域的路口信息、路段信息�、車道信息,以及道路之間的連接關系等�。與 SPAT 結(jié)合可以用于車速引導、綠波推送場景等���。
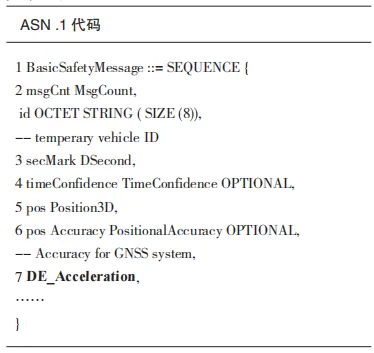
以最常用的車輛 BSM 為例����,車輛 BSM 使用最廣泛的應用層消息�,能夠在車輛之間交換安全狀態(tài)數(shù)據(jù)。車輛可以通過該消息的廣播��,將自身的實時狀態(tài)告知周圍車輛�����,以此支持一系 列 協(xié) 同 安 全 等 應 用。BSM 消 息 的 主 要 內(nèi) 容如下:
需要調(diào)整跟隨車行駛速度�,需要攜帶數(shù)據(jù)元素 DE_Acceleration 來定義車輛加速度。
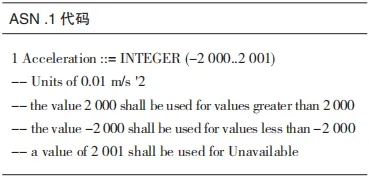
加速度分辨率為 0.01 m/s2���,數(shù)值 2 001 為無效數(shù)值�。BSM 消息中加速度參數(shù)內(nèi)容如下 :
1.3.2 領航車常用指令
在車輛編隊行駛場景中����,領航車通過車輛BSM 向跟隨車發(fā)布指令�����。主要指令如下文所述�����。
(1)調(diào)整速度指令��。
①指令消息����。領航車向其他車輛發(fā)送指定速度的調(diào)整指令。
②消息結(jié)果�����。其他車輛收到指令后會相應地減速或加速,以保證與領航車保持相對速度�。
(2)路線變更指令。
①指令消息���。領航車發(fā)送指定路線變更的指令�����,例如道路擁堵或前方事故的繞行路線���。
②消息結(jié)果。其他車輛收到指令后會相應地調(diào)整行駛路線���,避免造成擁堵或遇到事故�。
(3)警告和危險通知����。
①指令消息。領航車發(fā)送警告和危險通知��,例如前方道路有障礙物�、突發(fā)狀況或緊急剎車的情況����。
②消息結(jié)果�����。其他車輛收到通知后會采取相應的行動���,例如減速或采取避讓措施�,以確保車隊的安全�����。
(4)維護和停車指令���。
①指令消息。領航車發(fā)送維護和停車指令�,例如停車檢查或維護工作的需要。
②消息結(jié)果���。其他車輛收到指令后會相應地執(zhí)行停車或維護任務�����,以保持車隊的有效協(xié)調(diào)和運營�����。
2. PC5 接口安全威脅
智能車隊編組內(nèi)部通信主要包括:領航車向車隊內(nèi)部成員發(fā)送指令��;車隊內(nèi)部成員向領航車上報信息(如車輛狀態(tài)等)�����;車隊內(nèi)成員間相互報告位置等信息��。同時��,車隊還需要與外部的 RSU��、V2X 應用服務器進行通信����。其中,車隊內(nèi)部及車輛與 RSU 之間均通過 PC5 接口進行通信��,包括廣播和單播兩種通信模式�����。
根據(jù)上述信息交互的特點,隊內(nèi)部及車輛與 RSU 之間的通信過程主要面臨信息泄露�����、信息篡改�、身份仿冒等攻擊。
(1)虛假消息攻擊�。攻擊者可能發(fā)送虛假的消息給 V2X 車隊,以改變車隊的行為或傳遞錯誤信息�����,導致車隊出現(xiàn)混亂或危險情況�。
(2)交通干擾攻擊。攻擊者可能干擾車隊之間的通信�,導致車隊無法正常進行交通協(xié)作和協(xié)調(diào),增加交通事故和混亂的可能性����。
(3)路邊設備攻擊����。攻擊者可能通過篡改或干擾設備正常運行的方式,對路邊設備進行攻擊�,破壞車隊與基礎設施之間的通信���,影響車隊的安全和協(xié)同性能。
(4)車輛設備攻擊���。攻擊者可能利用漏洞或技術手段入侵車輛的電子系統(tǒng)�����,從而達到控制車輛的目的�,例如遠程控制車輛的剎車系統(tǒng)或方向盤���,對車隊進行惡意操縱或造成交通事故���。
(5)隱私泄露。V2X 通信系統(tǒng)涉及車輛信息的傳輸和共享����,攻擊者可能通過監(jiān)聽或攔截通信數(shù)據(jù),獲取車輛和駕駛者的敏感信息�����,侵犯用戶的隱私權。
2.1 通信可靠性風險
PC5 接口通信可靠性主要考慮通信時延和資源分配�����。
車輛在行駛過程中調(diào)整行駛速度需要一定時間進行加速或減速����,我國國標規(guī)定的客車剎車距離和汽車的制動性能應符合 GB 12676—2014《商用車輛和掛車制動系統(tǒng)技術要求及試驗方法》和 GB/T 13594—2003《機動車和掛車防抱制動性能和試驗方法》的規(guī)定:不超過九座的載客汽車行駛速度 50 km/h 時,剎車距離不超過19 m��,即車輛制動時間為 1 368 ms�。因此,在車輛編隊行駛中�����,從領航車發(fā)出指令到目標編隊成員生成駕駛策略并開始執(zhí)行��,時間間隔應在毫秒級方能滿足要求��。
PC5 接口資源分配方式有兩種:基站集中調(diào)度的資源分配模式 Mode3 和 UE 自主資源選擇模式 Mode4��。Mode3 模式下基站負責資源分配��。UE 發(fā)送數(shù)據(jù)前���,先向基站發(fā)送資源調(diào)度請求����,基站根據(jù)用戶業(yè)務特點�����、位置及資源占用情況分配資源�。Mode4 模式下終端自主從資源池中選擇資源。UE 利用業(yè)務周期性特點���,采用半持續(xù)調(diào)度機制�,在發(fā)送數(shù)據(jù)之前先進行測量�����,判斷哪些資源正在被使用或者已經(jīng)被預定�����,選擇并預定空閑的直通鏈路資源以盡量減少資源沖突�,提升網(wǎng)絡性能。受網(wǎng)絡覆蓋影響��,Mode4 模式在實際中的應用更為廣泛。
Mode4 模式下資源分配采用了半持久調(diào)度(Semi-Persistent Scheduling�����,SPS)方案�����,根據(jù)監(jiān)聽物理鏈路控制信道(Pysical Sidelink Control Channel���,PSCCH)��、 測 量 接 收 信 號 強 度 指 示(Received Signal Strength Indicator��,RSSI) 和參 考 信 號 接 收 功 率(Reference Signal Receiving Power�,RSRP)感知資源占用情況����,選擇能量低的資源作為通信信道。
基于 Mode3 和 Mode4 兩種模式下的資源選擇過程�����,攻擊者采用對應的無線頻段 / 信道對車隊內(nèi)車輛進行持續(xù)干擾�,使得車輛間無法相互通信�����,從而迫使車隊采取保護措施,如降低速度甚至停車�����、重新編組等��。此外����,對 PSCCH 信道進行針對性的占用 / 干擾,能夠?qū)崿F(xiàn)對指定跟隨車的干擾�。
2.2 信息泄露風險
車隊編組行駛過程中,領航車通過廣播向跟隨車發(fā)布指令���,跟隨車通過廣播向外發(fā)送自己的行駛狀態(tài)�����,并與 RSU 保持持續(xù)通信���。監(jiān)聽這些通信內(nèi)容可以獲取下列信息:
(1)車輛標識的暴露�。車輛標識是車輛的唯一標識符�,可以用于辨別車輛的身份和位置。如果未加密或未采取適當?shù)陌踩胧?�,攻擊者可以截獲和追蹤車輛標識��,從而識別車隊的車輛和其位置信息���。
(2)位置隱私的泄露��。V2X 通信中涉及車輛位置信息的傳輸���。如果未采取適當?shù)碾[私保護措施,攻擊者可以通過截獲����、分析或共享位置信息來推斷或跟蹤跟隨車的實時位置或行駛軌跡。
(3)車隊通信的監(jiān)聽和干擾�。V2X 通信中的消息傳輸可以在無線信道上進行,如車載無線網(wǎng)絡或車輛自組網(wǎng)等����。未經(jīng)適當加密或認證的通信可能受到監(jiān)聽或干擾的風險,導致車隊的通信內(nèi)容泄露或被篡改����。
(4)惡意車輛的偽裝�。在車隊行駛場景中���,惡意車輛可能偽裝成合法車輛并加入車隊�����。在這種情況下,惡意車輛可能獲取車隊的通信內(nèi)容�����、位置信息等敏感數(shù)據(jù)��,并可能采取進一步的攻擊行動����。
為了應對這些漏洞,車隊需要采取適當?shù)陌踩胧?���,如安全的身份認證和加密機制、位置隱私保護技術���、通信安全協(xié)議等��,以確保車隊行駛過程中的信息安全性和隱私保護����。
2.3 數(shù)據(jù)篡改風險
車輛編隊成員間及車輛與 RSU 間的許多消息是以廣播的形式發(fā)出的,廣播消息無法像單播消息一樣采用端到端加密�����,使得數(shù)據(jù)篡改攻擊難度較低�。數(shù)據(jù)篡改攻擊是指惡意主體在 V2X通信中對傳輸數(shù)據(jù)進行修改或篡改的一種攻擊方式。攻擊者可能利用中間人攻擊�����、側(cè)信道攻擊或惡意軟件等手段��,對 V2X 消息進行篡改��,以達到欺騙其他車輛或基礎設施的目的�。
攻擊者可以攔截 V2X 消息并修改其內(nèi)容,例如更改車輛位置信息�、交通信號燈狀態(tài)或者路況數(shù)據(jù)。這種篡改可以導致其他車輛做出錯誤的決策���,增加交通事故的發(fā)生風險����。
數(shù)據(jù)篡改攻擊可能存在以下潛在風險和影響:
(1)導致交通事故。通過篡改交通信號燈狀態(tài)或路況數(shù)據(jù)���,攻擊者可以使其他車輛做出錯誤的判斷和行駛決策���,從而增加了交通事故的發(fā)生風險。
(2)誤導導航系統(tǒng)���。通過篡改車輛位置信息和導航數(shù)據(jù),攻擊者可以將車輛引導至錯誤的道路或目的地�,給駕駛員帶來困惑和危險。
(3)影響交通流量�����。攻擊者可以修改車輛流量數(shù)據(jù)��,導致交通管理機構做出錯誤的交通調(diào)度決策�,進而影響整體交通流量。
(4)竊取個人隱私����。數(shù)據(jù)篡改攻擊可能導致惡意主體竊取車輛的相關信息����,對車主的隱私造成侵犯�����。
通過篡改領航車指令或者跟隨車的響應消息���,能夠影響車隊的行駛狀態(tài)����,從而達到控制車隊行駛速度�、路線的目的。例如�,篡改調(diào)整速度指令中的加速度數(shù)值,使跟隨車錯誤地加速或減速���,從而造成碰撞事故等��。
2.4 身份仿冒風險
身份仿冒的第一步是獲取車輛身份 ID:一是通過監(jiān)聽車隊內(nèi)廣播消息���,獲取跟隨車的ID�����;二是獲取車隊所屬單位的其他車輛身份 ID(非車隊成員)��。
第二步是利用獲取到的車輛身份 ID 發(fā)送消息�,如果獲取的車輛身份 ID 是跟隨車的�����,則可以利用獲取的 ID 仿冒跟隨車輛發(fā)送消息�,擾亂車隊行駛;如果獲取的車輛身份 ID 是車隊所屬單位的其他車輛的���,則可以嘗試申請加入車隊,然后采取獲取車隊信息或發(fā)送錯誤消息的方式擾亂車隊行駛����。
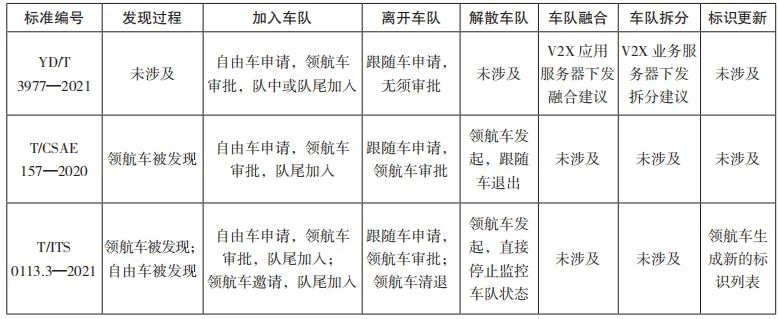
領航車負責管理車隊的成員列表,當車隊成員變化時�����,領航車及時更新車隊成員列表。國內(nèi)外各標準對于管理過程的研究存在一定差異��,具體對比結(jié)果如表 1 所示��。
表 1 主要標準中車隊成員管理規(guī)定
由表 1 可以發(fā)現(xiàn)���,國內(nèi)外的標準都支持由自由車申請��、領航車批準的過程加入車隊�,可以采用仿冒相同運營方的車輛以自由車身份加入車隊����。YD/T 3977—2021《增強的 V2X 業(yè)務應用層交互數(shù)據(jù)要求》和 T/CSAE 157—2020《合作式智能運輸系統(tǒng) 車用通信系統(tǒng)應用層及應用數(shù)據(jù)交互標準》中,車與車的通信方式采用無連接模式�,要求領航車和跟隨車需要解析周圍所有車輛發(fā)送的信息,跟蹤隊內(nèi)所有車輛的狀態(tài)��。
3. 防御建議
針對上述的安全威脅���,在現(xiàn)有技術條件下���,下列低成本的防御策略可供參考:
(1)預置資源池。對于通信可靠性的防御��,可在車隊初始編組時預置資源池,并設置通信受干擾時的應對策略���,比如跟隨車保持靜默����,領航車使用預留信道發(fā)送指令�����,跟隨車順序中轉(zhuǎn)指令��,在通信受到干擾的情況下確保車隊成員能夠采取統(tǒng)一的應對措施���,避免發(fā)生交通事故���。
(2)消息加密和完整性保護。使用適當?shù)募用芩惴▽崿F(xiàn)消息的加密和完整性保護�,確保接收到的消息的完整性和真實性,防止信息泄露及篡改者對消息進行未授權修改�。在車隊進行初始編組時���,由 V2X 應用服務器向所有車輛下發(fā)多組密鑰(每組包含加密密鑰和完整性保護密鑰)�����,由領航車確定使用哪組密鑰及何時更換密鑰�;并在車隊解散時通知 V2X 應用服務器銷毀密鑰,避免密鑰的重復使用�����。
(3)身份認證機制����。PC5 接口上的廣播消息可以采用身份認證機制,確保只有經(jīng)過授權的實體才能發(fā)送和接收廣播消息�����。認證可以防止未授權的實體發(fā)送錯誤的廣播消息�����??刹捎煤诎酌麊螜C制,車輛所屬單位可設置車輛白名單�,并將其存儲在 V2X 應用服務器和 OBU 中,在發(fā)生改變時�,由 V2X 應用服務器及時更新 OBU 中的白名單數(shù)據(jù)����。在車隊成員列表發(fā)生變化時��,對非白名單成員進行及時告警���,并由 V2X 應用服務器或操作人員進行審核��。
(4)應用區(qū)塊鏈技術提升車聯(lián)網(wǎng)安全��。區(qū)塊鏈集成了分布式數(shù)據(jù)存儲�����、點對點傳輸�����、共識機制����、加密算法等技術�,為車聯(lián)網(wǎng)安全提供了新的解決思路 ,在通信安全��、數(shù)據(jù)安全�、應用安全等領域發(fā)揮作用。
基于區(qū)塊鏈的認證機制和信任管理可以有效識別惡意節(jié)點�����,避免虛假 / 惡意消息的傳播���,在一定程度上保證了車聯(lián)網(wǎng)通信安全���。
區(qū)塊鏈由于其分布式存儲、不可篡改等特點�,可以保證車輛間共享數(shù)據(jù),并且保證共享數(shù)據(jù)的安全?�,F(xiàn)有固件更新采用客戶端—服務器模式��,存在單點故障問題�。文獻 [12] 提出基于區(qū)塊鏈的自動駕駛汽車固件更新方案,由車輛制造商組成的聯(lián)盟鏈通過編寫固件更新相關的智能合約���,保證固件更新內(nèi)容的完整性和真實性�����,并利用基于屬性的加密技術支持制造商設置訪問策略���,防止未授權的固件更新請求����。
區(qū)塊鏈引入到車聯(lián)網(wǎng)中可以提升車聯(lián)網(wǎng)應用的效率����、可擴展性、安全性��。隨著區(qū)塊鏈技術在數(shù)字資產(chǎn)管理 / 共享領域的廣泛應用����,車輛尤其是商用車輛及其行駛數(shù)據(jù)以數(shù)字資產(chǎn)與公共鏈、企業(yè)鏈中的數(shù)字資產(chǎn)融合����,在車輛管理安全、交通管理安全���、事故取證安全����、運輸運營等領域?qū)崿F(xiàn)數(shù)據(jù)共享、自動化管理等���。例如,與交通管理部門公共鏈融合�,實現(xiàn)對車輛的技術監(jiān)督和安全管理,包括車輛檔案管理���、行車安全管理�、用車記錄管理等���;與智能交通設施實現(xiàn)聯(lián)動����,提升道路通行效率��,減少溫室氣體排放��。
(5)匿名化和偽裝技術��。為了保護車輛和車輛駕駛員的隱私�����,可以采用匿名化和偽裝技術,通過隱藏車輛的真實標識或使用臨時標識來降低敏感信息的泄露風險��。
除了上述技術手段�����,對于車輛的日常維護和人員教育也是必不可少的��,例如:
(1)安全軟件更新和補丁管理����。及時更新車輛和基礎設施中的軟件和固件,修補已知的安全漏洞�,以防止惡意軟件的利用。
(2)強化安全意識�。提高駕駛員和車輛制造商對數(shù)據(jù)篡改攻擊的認識和意識,教育駕駛員不輕信從 V2X 消息獲得的信息�����,并提高對異常行為和信息一致性的警惕����。
(3)安全審計和監(jiān)控。建立安全審計機制,對 V2X 通信進行實時監(jiān)控和審查�,及時發(fā)現(xiàn)和應對潛在的攻擊行為。
4. 結(jié) 語
當前技術水平下�����,領航車采用有人駕駛��,跟隨車采用無人駕駛的智能車隊編組行駛是最有可能規(guī)?;逃玫闹悄荞{駛技術���。尤其是在公路貨運市場�����,一方面智能駕駛本身就有車隊運輸?shù)男枨?�,另一方面智能駕駛能夠有效降低人工成本和燃油成本�����。此外�,無人駕駛的智能車隊編組行駛還能夠有效降低相關部門對公路貨運車輛的監(jiān)管成本�����,實現(xiàn) V2X 技術公司、物流公司和政府的三贏��。但智能車隊編組也帶來了新的安全風險����,在原來的車輛、司機因素之外引入了新的安全威脅��,尤其是 PC5 接口的直連通信是車輛編隊通信的主要信道��,其安全風險直接威脅到車輛的安全行駛���。
引用格式:張廣順 , 王煒 , 江軍 , 等 . 基于 C-V2X 直連通信的車輛編隊安全威脅分析 [J]. 信息安全與通信保密 ,2024(2):93-104.
作者簡介 >>>
張廣順�����,男���,碩士,工程師���,主要研究方向為無線通信安全����;
王 煒,男���,博士�,高級工程師����,主要研究方向為網(wǎng)絡空間安全;
江 軍����, 男���, 碩 士��, 工 程 師���,主要研究方向為網(wǎng)絡空間安全、數(shù)據(jù)安全�����;
吳 超, 男�, 碩 士, 工 程 師�,主要研究方向為移動通信網(wǎng)絡安全。
選自《信息安全與通信保密》2024年第2期(為便于排版����,已省去原文參考文獻)



 在線咨詢
在線咨詢 在線咨詢
在線咨詢 0371-63319761
0371-63319761